|
Siddarth Narasimhan I recently completed my MASc at the University of Toronto Robotics Institute, advised by Dr. Goldie Nejat, where I worked on building novel navigation algorithms for robots using diffusion and large foundation models. Currently, I'm working full-time at Syncere to build Lume. Last Updated: Nov '25 |

|
News |
|
{kind=link}
{kind=link}
Publications |
|
|
Siddarth Narasimhan, Matthew Lisondra, Haitong Wang, Goldie Nejat RA-L 2025 (Under Review) Paper / Project Page / Code We address the Instance Image Goal Navigation problem by introducing SplatSearch, a novel architecture that leverages 3D Gaussian Splatting (3DGS) reconstructions. SplatSearch renders multiple viewpoints around candidate objects using a sparse online 3DGS map, and uses a multi-view diffusion model to complete missing regions of the rendered images. It also employs a novel frontier exploration policy which uses visual and semantic context to guide the robot towards the goal image. |
|
|
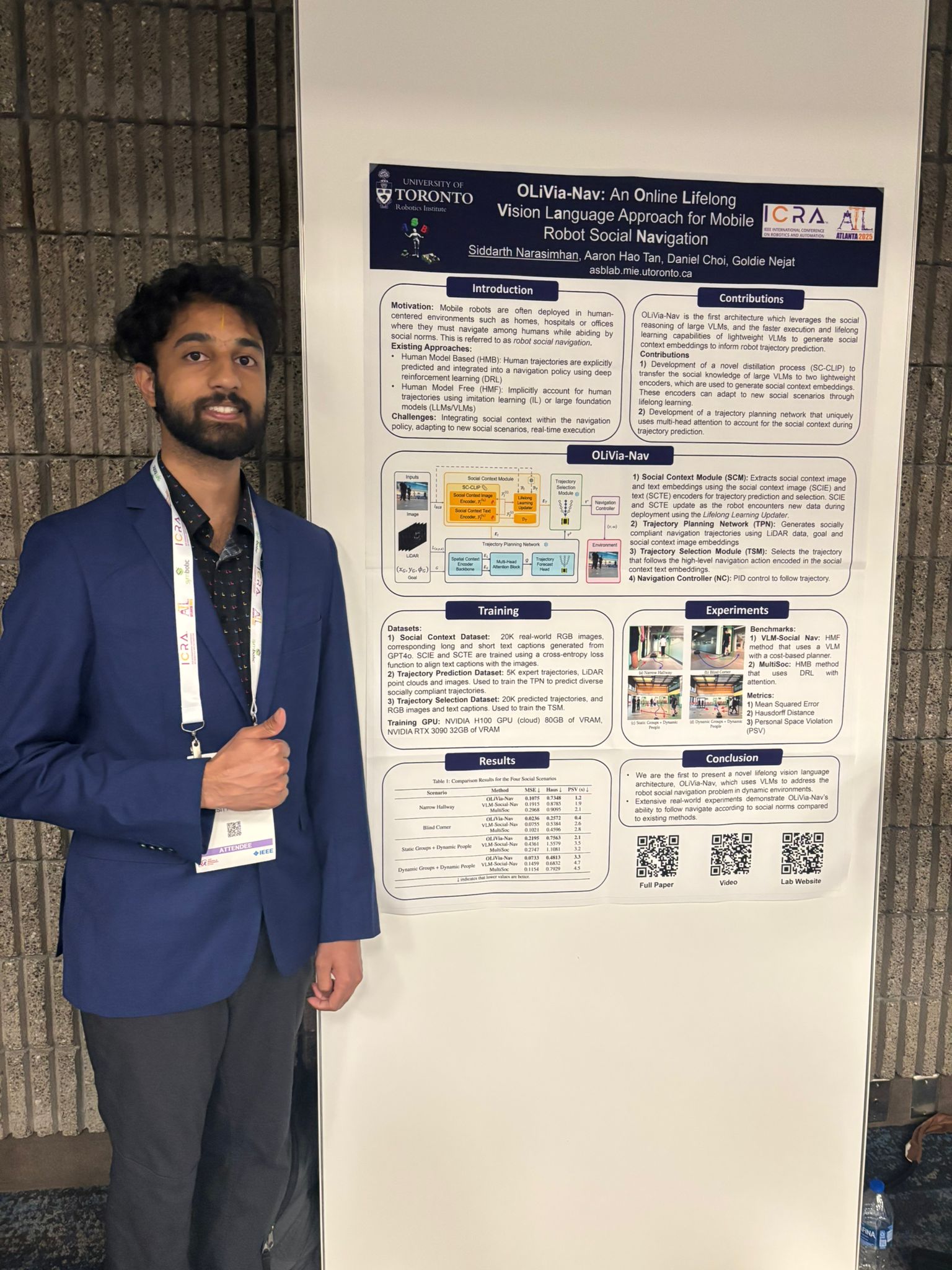
Siddarth Narasimhan, Aaron Hao Tan, Daniel Choi, Goldie Nejat ICRA 2025 + LLHomeRobots @ CoRL 2024 (Spotlight) + LangRob @ CoRL 2024 Paper / Poster / Video / Talk We introduce OLiVia-Nav, an online lifelong vision language architecture for mobile robot social navigation. By leveraging large vision-language models (VLMs) and a novel distillation process called SC-CLIP, OLiVia-Nav efficiently encodes social and environmental contexts, adapting to dynamic human environments. |
|
|
Aaron Hao Tan, Siddarth Narasimhan, Goldie Nejat IEEE T-RO 2025, (Conditional Acceptance) Paper / Video We present a novel robot exploration map prediction method called Confidence-Aware Contrastive Conditional Consistency Model (4CNet), to predict (foresee) unknown spatial configurations in unknown unstructured multi- robot environments with irregularly shaped obstacles. |
Research Collaborations |
|
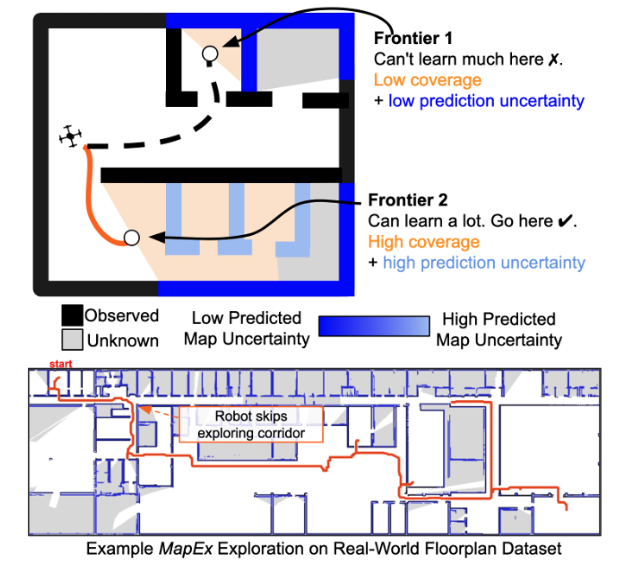
Siddarth Narasimhan (Acknowledged) ICRA 2025 Paper A new exploration framework that uses map prediction to form probabilistic sensor model for information gain estimation. |
Work Experience |

|
Founding Engineer Nov 2024 - Present A startup to build home robots. |

|
Power Design Engineer / Firmware Engineer - Data Center May 2021 - Apr 2022 Documented performance of ASICs using metrics such as power efficiency, over current protection, dynamic response and power up. Inspected schematics and layouts to rework damaged boards and recommend improvements. Designed a robust Remote Management platform using a Raspberry Pi to automate the generation and sending of I2C/SMBUS/ MCTP/PLDM packets, and decode and debug live traffic through a custom-built GUI. Received Spotlight Award for novel contributions and excellent performance as a co-op student. |
|
|
Data Science Intern Jun 2020 - Aug 2020 Developed an intelligent provincial transportation system for highway analytics by leveraging GPS data and machine learning. Used by the Ministry of Transportation to obtain live traffic volume estimates on GTA highways. Designed a novel timestamp detection and recognition algorithm to locate and convert timestamps found in highway video feed to text. |
|
|
Data Analyst Jun 2018 - Aug 2018 / May 2019 - Aug 2019 Built macro-powered databases to analyze thousands of spend transactions by Ontario ministries and standardize annual reporting. Engineered the databases using advanced techniques and visualization tools, such as Microsoft Excel, Access and Power BI. |
Projects |
|
|
Implemented state-of-the-art VLM frameworks (ReKep, Pi0) on the Koch_v1.1 manipulator to enable zero-shot, prompt-driven object manipulation. |
|
|
I designed a robust SCARA manipulator mounted on a Clearpath Jackal for precise pick-and-place applications, powered by vision-language models and computer vision. It was programmed to play chess! |
|
|
An object-oriented C++ implementation of popular variants of the rapidly exploring random trees algorithm, including RRT, RRT*, Anytime RRT and Informed RRT*. |
|
|
The goal of RobotVision is to simulate control, path-planning, localization and mapping of a non-holonomic robot in a 2D world, while also providing a comprehensive mathematical formulation of each method. Implementation includes PID Control, lead-lag control, Dubin's path calculator, Extended Kalman Filter, and SLAM. |
|
|
For our capstone project, we built a drone that is capable of stable hover, waypoint navigation and obstacle avoidance. Our team won the award for smoothest flight! |
Scholarships |
|
2025: IEEE Robotics and Automation Society ($2k) 2024: NSERC HeRo CREATE Fellowship ($10k) 2020: Mario And Dorothy Pesando Scholarship ($4k) 2018: Hira And Kamal Ahuja Award In Engineering ($1.5k) 2018: Loblaw Scholarship ($1.5k) 2018: UofT Engineering Entrance Scholarship ($2k) 2018: Municipal Engineers Association Bursary ($1.5k) |
{kind=link}
{kind=link}
Teachings |
|
2025 W: MIE443: Mechatronics Systems: Design & Integration, Lab TA, University of Toronto 2024 W: MIE443: Mechatronics Systems: Design & Integration, Lab TA, University of Toronto |
Extracurricular Achievements |
|
2023 S: Excelsior June Open U2000, 2nd Place (Standings) 2022 F: Hart House Holidays U1900 Chess Tournament, 1st Place (Picture/Standings) 2019 S: Canadian Junior Chess Championship U1300, 1st Place (Picture/Standings) 2018 W: Ontario High School Chess Championship, Team: 2nd Place, Individual: 4th Place (Picture/Standings) 2018 W: Peel Chess League - Team: 2nd Place (Picture) 2017 F: UWaterloo - Canadian Senior Math Contest, 1st Place at High School (Medal) 2017 W: ROPSSAA Table Tennis, Men's Singles, 4th Place (Medal) 2017 W: Region of Peel Chess Tournament - Seniors, 3rd Place (Picture) 2016 W: Region of Peel Chess Tournament - Juniors, 1st Place |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
|
Thank you to Jon Barron. |